Главная »
Главная »
В конце 50-х годов прошлого века разведка нефти на морском шельфе сдвигается в районы с глубинами, не позволяющими использовать самоподъемные (jack-up) буровые платформы и делающими применение буровых установок с якорным удержанием (anchor-based positioning) экономически нецелесообразным. Появилась очевидная необходимость использования альтернативной технологии позиционирования, не зависящей от глубины моря. Ей стало динамическое позиционирование, т.е. удержание судна за счет сил, создаваемых подруливающими устройствами и пропульсивной установкой.
Однако первый опыт динамического позиционирования не был связан с нефтедобычей. В 1961 году буровое судно “Cuss 1” (имя от Continental, Union, Shell & Superior oil consortium) было оборудовано четырьмя винто-рулевыми колонками (ВРК) c дизельным приводом, мощностью 250 л.с каждая. С помощью ручного управления ВРК, определяя местоположения по радиолокатору с буями и гидролокатору с донными маяками, удалось обеспечить удержание судна в круге радиусом 180 м. Это позволило в рамках геофизического исследовательского проекта Mohole Project осуществить бурение на глубинах до 3500 м.
Полученный положительный опыт с “Guss 1” подтвердил перспективность принципа ДП, но вместе с тем “Guss 1” не являлось полноценным ДП судном, поскольку управление ВРК осуществлялось в ручном режиме. В том же 1961 году по заказу компании Shell было построено буровое судно “Eureka”, оборудованное двумя ВРК с электроприводом, аналоговым контроллером ДП и датчиком положения типа “натянутый трос” (taut wire). “Eureka” являлось первым полноценным судном с СДП, где был реализован режим автоматического позиционирования. Это позволило проводить до девяти бурений в день на глубинах более 1000 м, в то время как конкуренты с якорным позиционированием могли провести только одно. В 1968 году компанией Levingston Shipbuilding (США) было построено исследовательское буровое судно “Glomar Challenger”, где впервые для управления ДП были применены цифровые компьютеры.
С 1961 года начинается развитие ДП. Область его применения постоянно расширяется, от обеспечения буровых работ до крановых судов (crane vessels), кабелеукладчиков (cable laying vessels), трубоукладчиков (pipe laying vessels), якорезаводчиков (Anchor Handling Tug Supply Vessels), судов для транспортировки экипажа (crew boats), судов поддержки водолазов (dive support vessels), судов снабжения платформ (platform supply vessels), исследовательских судов (survey vessels), пожарных судов (fire fighting vessels) и др.
В 1980 году морская индустрия насчитывала около 65 судов с ДП. К 1985 их было уже более 150, благодаря внедрению спутниковой технологии для определения местоположения. В этом плане революционным было создание спутниковой навигационной системы GPS (Global Positioning System) и открытие доступа к ее использованию в коммерческих целях.
Дальнейшее накопление опыта применения и увеличение количества судов с ДП привело к созданию в 1989 году Ассоциации владельцев судов с динамическим позиционированием (Dynamic Positioning Vessel Owners Association – DPVOA) для обобщения опыта эксплуатации и выработки на этой основе соответствующих рекомендаций. В 1994 году DPVOA совместно с Международной Морской Организацией (International Maritime Organization – IMO) разработали основополагающий документ – циркуляр комитета IMO по безопасности на море (Maritime Safety Committee – MSC) MSC/Circ. 645 “Guidelines for vessels with dynamic positioning systems”, содержащий классификацию и руководящие указания по системам динамического позиционирования (СДП), обязательные для судов постройки после 1 июля 1994 года. В 1995 году DPVOA объединилась с Международной ассоциацией подрядчиков водолазных работ (Association of Offshore Diving Contractors – AODC), в результате была создана Международная ассоциация морских подрядчиков (International Marine Contractors Association – IMCA). С тех пор и до настоящего времени IMCA является основным органом, стандартизующим процессы и документооборот в области морских операций и разрабатывающим соответствующие руководящие документы. С момента образования IMCA выпущено более 250 документов, из них более 50 относятся непосредственно к ДП, например, IMCA M 103 “Guidelines for the design and operation of dynamically positioned vessels”.
Циркуляр IMO MSC/Circ.645 впервые формально определил структуру СДП и ввел ее деление на классы.
Спустя 20 лет после выхода циркуляра IMO MSC/Circ.645 стала очевидной необходимость приведения его в соответствие с достигнутым уровнем разработки, производства и применения СДП. С этой целью IMCA в 2014 году для поддержки IMO была создана рабочая группа, в состав которой вошли также представители АО “НАВИС”. В результате совместной работы IMO и IMCA в 2017 году вышел циркуляр IMO MSC.1/Circ.1580 “Guidelines for vessels and units with dynamic positioning (DP) systems”, обязательный для судов постройки после 9 июля 2017 года. В частности, циркуляром предусматривается независимая джойстиковая система управления позицией и курсом, а также проведение анализа отказов и их последствий (Failure mode and effects analysis – FMEA).
Для судов более ранней постройки допускается действие IMO MSC/Circ.645.
Система динамического позиционирования (СДП) – комплекс технических средств, необходимых для динамического удержания судна над точкой позиционирования и/или на курсе с заданной точностью в условиях возмущающих воздействий внешних сил.
СДП включает в себя следующие подсистемы:
Выделяется три класса СДП в зависимости от последствий наихудшего единичного отказа:
Для СДП class 2 и class 3 единичным отказом считается также непреднамеренное действие оператора.
Таким образом,
Суда с СДП class 1 применяются для выполнения операций, где риск потери позиции не приводит к критическим последствиям и связан с незначительным экономическим ущербом (повреждения, загрязнения).
Суда с СДП class 2 применяются для выполнения операций, где риск потери позиции может привести к критическим последствиям, и связан с существенным экономическим ущербом (повреждения, загрязнения) или травмированием персонала, например, суда обслуживания морских платформ.
Суда с СДП class 3 применяются для выполнения операций, где риск потери позиции связан с значительным экономическим ущербом (повреждения, загрязнения) или смертью персонала, например, буровые суда.
В плане СУ ДП циркулярами IMO предусматривается:
Независимая джойстиковая система предназначена для безопасного завершения операции при отказе автоматической системы ДП. Любой единичный или кратный отказ в автоматической системе не должен влиять на работоспособность НД.
По системам определения местоположения (СОМП) и датчикам воздействия внешних сил циркулярами предъявляются следующие минимальные требования:
|
СОМП и датчики |
Класс IMO |
||
|
Class 1 |
Class 2 |
Class 3 |
|
|
СОМП |
2 * |
3 * |
3 * Одна СОМП за переборкой А-60 |
|
Датчик курса |
1 |
3 |
3 Один датчик за переборкой А-60 |
|
Датчик ветра |
1 ** |
3 ** |
3 ** Один датчик за переборкой А-60 |
|
Датчик качки |
1 ** |
3 ** |
3 ** Один датчик за переборкой А-60 |
* – как минимум одна СОПМ должна быть основана на другом физическом принципе;
** – прямых указаний по количеству в циркулярах нет, соответствует принятой практике.
Положения IMO MSC/Circ.645 послужили базой разделов СДП в нормативных документах основных морских классификационных обществ:
American Bureau of Shipping (ABS, США) “Guidance for Dynamic Positioning Systems”;
Bureau Veritas (BV, Франция) Rules for the Classification of Steel Ships, Part F, Chapter 11, Section 5 “Dynamic Positioning (DYNAPOS)”;
China Classification Society (CCS, Китай) Rules for Classification of Sea-Going Steel Ships, Part 8, Chapter 11 “Dynamic Positioning Systems”;
Det Norske Veritas (DNV, Норвегия) Rules for Classification, Part 6 Chapter 3, section 1 “Dynamic Positioning Systems – DYNPOS and DPS”;
Lloyd’s Register (LR, Великобритания) Rules and Regulations for the Classification of Ships, Part 7, Chapter 4 “Dynamic Positioning Systems”;
Registro Italiano Navale (RINA, Италия) Rules for the Classification of Ships, Part F, Chapter 13, Section 6 “Dynamic Positioning (DYNAPOS)”;
Российский Морской Регистр Судоходства (РМРС, Россия) Правила классификации и постройки морских судов, часть XV “Автоматизация” раздел 8 “Системы динамического позиционирования”:
Indian Register of Shipping (IRS, Индия) Rules & Regulations for the Construction and Classification of Steel Ships, Part 5, Chapter 24 “Dynamic Positioning Systems”.
Каждым классификационным обществом установлены знаки, соответствующие классам ДП.
|
Класс IMO |
ABS |
BV |
CCS |
DNV |
LR |
RINA |
РМРС |
IRS |
|
– |
DPS-0 |
DYNAPOS SAM |
– |
– |
DP(CM) |
DYNAPOS- SAM |
– |
DP(0) |
|
– |
– |
– |
– |
DYNPOS(AUTS) |
– |
– |
– |
DP(0) |
|
Class 1 |
DPS-1 |
DYNAPOS AM/AT |
DP-1 |
DYNPOS(AUT) DPS(1) |
DP(AM) |
DYNAPOS- DP1 |
DYNPOS-1 |
DP(1) |
|
Class 2 |
DPS-2 |
DYNAPOS AM/AT R |
DP-2 |
DYNPOS(AUTR) DPS(2) |
DP(AA) |
DYNAPOS- DP2 |
DYNPOS-2 |
DP(2) |
|
Class 3 |
DPS-3 |
DYNAPOS AM/AT RS |
DP-3 |
DYNPOS(AUTRO) DPS(3) |
DP(AAA) |
DYNAPOS- DP3 |
DYNPOS-3 |
DP(3) |
Некоторыми классификационными обществами установлены дополнительные знаки ДП, не предусмотренные IMO. Так, DPS-0, DYNAPOS SAM, DP(CM) и DP(0) соответствуют джойстиковой системе централизованного ручного управления позицией и курсом с режимом автоматического удержания курса. DYNPOS(AUTS) соответствует нерезервированной автоматической системе удержания позиции и курса.
Кроме основных правил ряд классификационных обществ разработал дополнительные документы по ДП, такие как руководящие указания или рекомендуемые практики.
ДП является задачей управления на плоскости, характеризуемой продольным и боковым перемещением судна, а также его вращением. Таким образом, для ДП комплекс пропульсивных механизмов судна должен отвечать нескольким требованиям:
1) обеспечивать независимое создание продольной силы, боковой силы и вращающего момента. Например, минимальная конфигурация пропульсивных механизмов для class 1 включает два гребных винта, два руля за винтами и одно носовое подруливающее устройство; для class 2 пропульсивные устройства должны иметь избыточность, позволяющую при любом единичном отказе сохранять требуемую способность независимого создания сил и момента;
2) максимальные значения создаваемых сил и момента должны соответствовать требуемым погодным условиям (скорость ветра, высота волн, скорость течения); обычно проверяется расчетом диаграмм удержания;
3) скорость изменения сил и моментов должна соответствовать динамике внешних воздействий, например:
4) обеспечивать длительную непрерывную работу.
Для судов с ДП наиболее распространенными типами энергетической системы являются
дизель-электрическая энергетическая установка и энергетическая установка на базе валогенераторов.
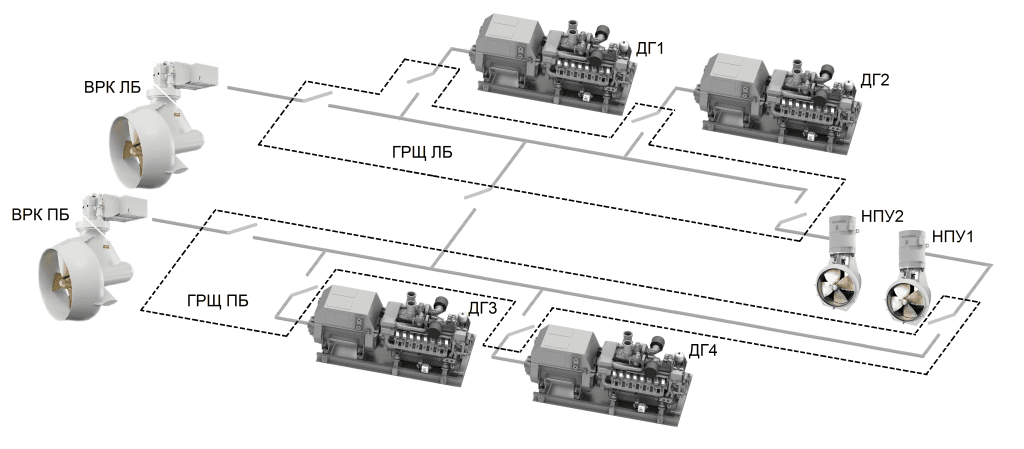
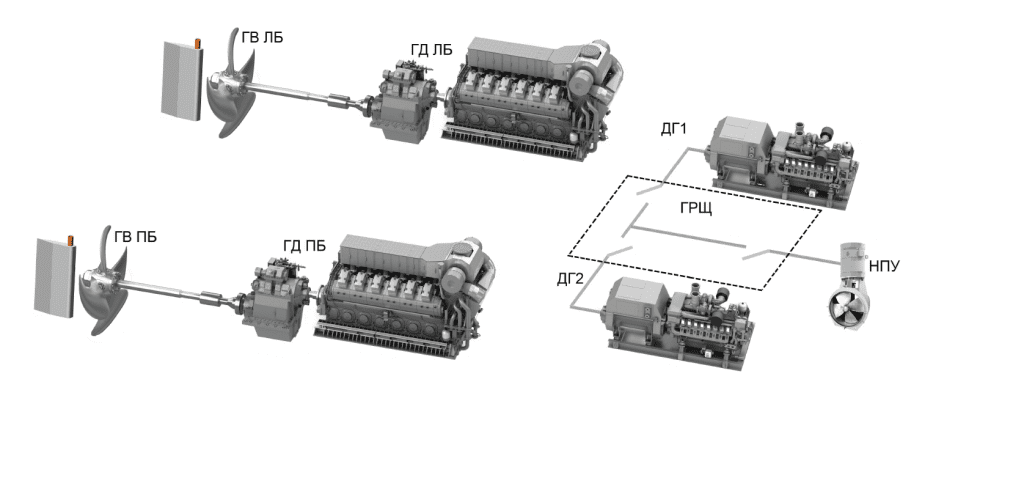
Типовая схема дизель-электрической установки с комплексом пропульсивных механизмов СДП класса 2 приведена ниже. Две пары дизель-генераторов (ДГ1 – ДГ4) работают на две секции главного распределительного щита (ГРЩ), соединенные межсекционным выключателем. От каждой секции получает питание одно носовое туннельное ПУ (НПУ) и одна кормовая ВРК. Межсекционный выключатель обеспечивают изоляцию при отказе одной из шин (например, короткое замыкание) и сохранение способности судна удерживать позицию.
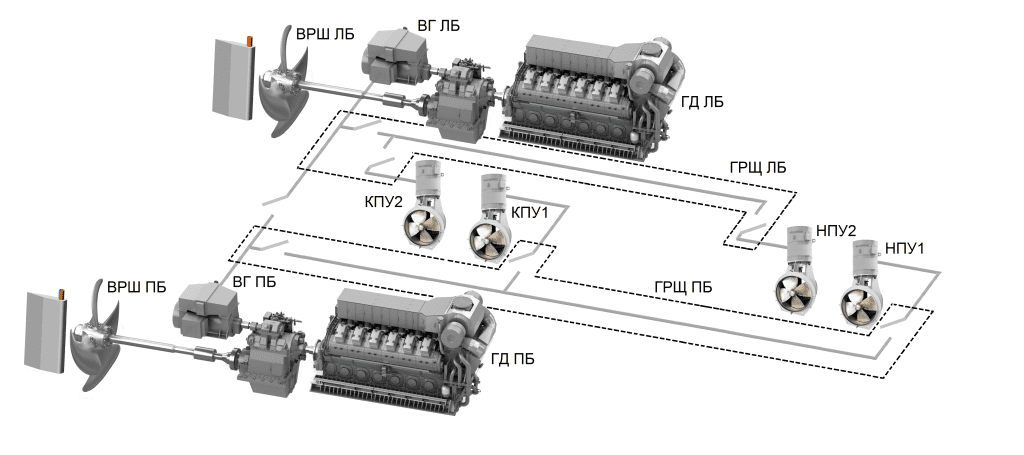
Типовая схема энергетической системы на базе валогенераторов с комплексом пропульсивных механизмов СДП класса 2 приведена ниже. Судно оборудовано главной пропульсивной установкой с ВРШ, от дизельного привода которых (главный двигатель – ГД) отбирается мощность на два валогенератора (ВГ1, ВГ2). Каждый ВГ работает на свою секцию ГРЩ, между секциями межсекционный выключатель. От каждой секции получает питание одно носовое туннельное ПУ (НПУ) и одно кормовое туннельное ПУ (КПУ). Параллельная работа ВГ не допускается, поэтому в режиме работы с двумя ВГ межсекционный выключатель разомкнут. При работе с одним ВГ межсекционный выключатель может быть замкнут и все ПУ получают питание от одного ВГ.
Структура типовой СУ ДП класса 2 АО «НАВИС» для СДП с дизель-электрической энергетической установкой приведена ниже.
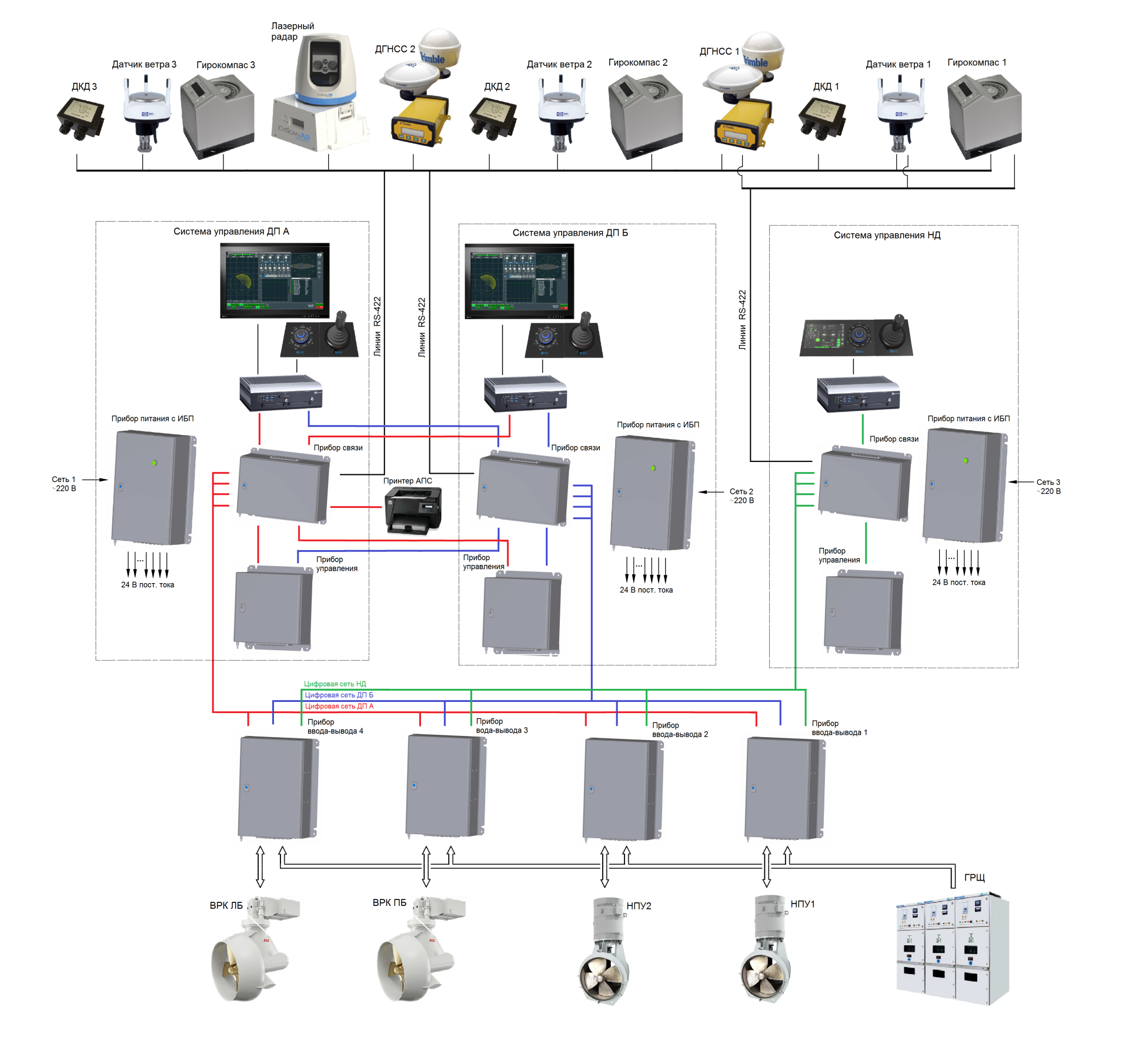
Система включает в себя:
В состав СУ ДП А (ДП Б) и СУ НД входит:
ПВВ предназначены для разделения аппаратных интерфейсов пропульсивных механизмов и энергетической системы на три канала, подключаемые к цифровым сетям ДП А, ДП Б и НД.
Стандартный состав датчиков включает датчики курса (гирокомпасы), датчики крена и дифферента, датчики ветра, а также системы определения местоположения (СОМП). Большинство классификационных обществ для систем class 2 требует по три датчика каждого типа и три СОМП. Что касается СОМП, из трех как минимум две должны работать на разных физических принципах. В представленной схеме это две дифференциальных глобальных навигационных спутниковых системы (ДГНСС) и лазерный радар. Такой набор характерен для судов снабжения, представляющих основную массу судов с ДП.
Часто необходимы решения без знака ДП, соответствующие минимальным требованиям функциональности удержания позиции и курса (так называемые системы ДП0). СДП ДП0 применяются для выполнения операций, где риск потери позиции не связан с угрозой жизни или экономическим ущербом (повреждения). Пример минимальной конфигурации пропульсивных устройств включает два гребных винта с дизельным приводом, два руля за винтами и одно носовое подруливающее устройство с электроприводом.
Структура типовой СУ ДП0 акционерного общества «НАВИС» приведена ниже.
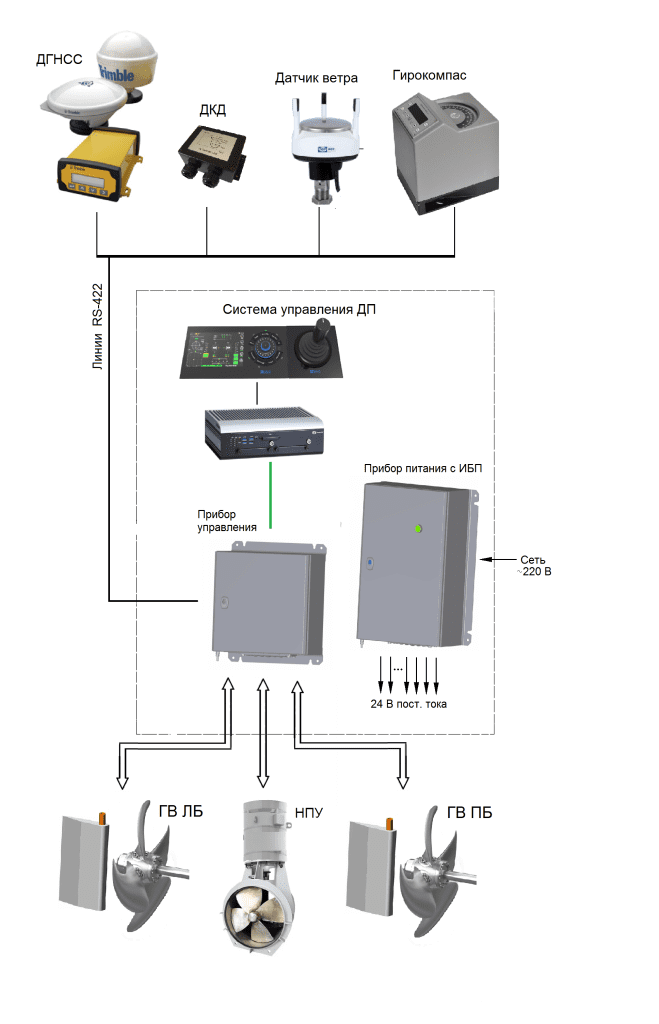
В состав СУ ДП0 входит:
Стандартный состав датчиков включает датчик курса (гирокомпас), датчик крена и дифферента (ДКД), датчик ветра, а также систему определения местоположения (обычно приемник ДГНСС).
Судно с ДП должно иметь центр управления ДП (DP control center), где сосредоточено оборудование, необходимое для работы оператора ДП. Как минимум это:
Из центра управления ДП должен обеспечиваться хороший обзор окружающего пространства, с которым связано выполнение работ в режиме ДП.
Оборудование должно быть размещено таким образом, чтобы к нему обеспечивался удобный доступ без необходимости оператору менять рабочее положение и/или поворачиваться спиной к операционному полю.
Современная, классическая СУ ДП управляет судном преимущественно на малых ходах, позволяя удерживать позицию, курс, управлять судном на траектории и в различных специфических режимах, определяемых назначением судна.
Еще 15-20 лет назад СУ ДП устанавливались в основном на специализированные суда (буровые, суда обеспечения, водолазные и т.п.). Это сложные системы, требующие квалифицированных ДП-операторов. В последние годы СУ ДП ставятся также на яхтах, круизных и прочих судах, где не требуется высокоточное позиционирование, с целью обеспечения удобства управления судном от одной рукоятки (джойстика). Как правило, такой системой управляет судоводитель, не имеющий квалификации ДП-оператора.
Благодаря широкому распространению СУ ДП на различных типах судов появилась тенденция работать в режиме ДП во всем диапазоне ходов (от малых до полных, all speed control), используя функционал “всескоростного джойстика”.
Таким образом, современные СУ ДП разделились на два направления: СУ ДП классов 1/2/3 для классических приложений и джойстиковые системы, к которым потребители предъявляют принципиально различные требования. Первые – системы, предназначенные для решения специализированных задач, обладающие высокой точностью, устойчивостью к отказам и широкими возможностями по настройке, вторые – простые, унифицированные системы, где предпочтение в первую очередь отдается простоте и удобству интерфейса, но при этом не менее точные и совмещенные с функциональными возможностями ДП.
Современная СУ ДП может обеспечивать различные режимы автоматического управления движением судна – от мягкого удержания в точке и управления джойстиком (для круизных судов и яхт) до высокоточных работ при кабелеукладке, бурении, дноуглубительных и насыпных работах.
В последние годы повысился интерес к автономным судам, где СУ ДП рассматривается как основа построения автономной системы управления движением судна.
Преимущества использования судов с ДП:
АО «НАВИС» основана в 1992 году и изначально специализировалась на разработке математических моделей движения судов и соответствующего программного обеспечения, а также алгоритмов управления движением судов.
В 1993 году разработана математическая модель для навигационного тренажера, в 1995 году разработан и поставлен первый авторулевой и система управления рулевым приводом.
Созданный за 8 лет научный и технический задел позволил с 2000 года начать разработку, производство и поставку систем управления динамическим позиционированием (СУ ДП).
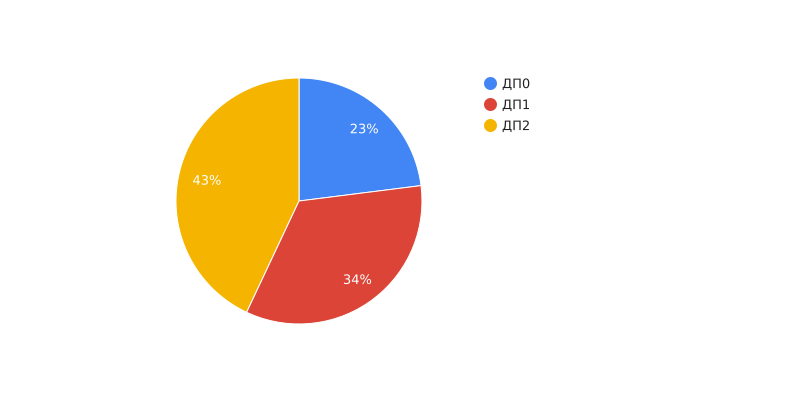
В период с 2000 по 2024 год компанией поставлено около 900 систем управления ДП, из них 23% – DP0, 34% – DP1, 43% – DP2 .
Основную долю занимают суда снабжения (Offshore Supply Vessels – OSV) – 40%; далее идут скоростные суда доставки персонала (crew boats) – 17%; суда обеспечения, якорезаводчики и многоцелевые суда – 14%; исследовательские суда – 8%; ледоколы и спасатели – 7%; земснаряды, кабеле- и камнеукладчики – 5%; круизные суда, яхты и паромы – 4%; прочие (грузовые, буксиры, танкеры, самоподъемные, ЛАРН, патрульные) – 5%.

В настоящее время АО «НАВИС» является единственным в России и входит в пятерку мировых лидеров по производству серийных систем управления динамическим позиционированием.
Преимущества СУ ДП АО «НАВИС»:
Компания имеет как собственную сервисную службу, так и сеть партнеров в РФ и за рубежом. Благодаря этому АО «НАВИС» собственными силами осуществляет удаленную диагностику систем, обновление ПО и обучение партнеров. Также с привлечением международных партнеров выполняются обязательства по гарантийному и постгарантийному обслуживанию в любой точке мирового океана.
Основным требованием к судну с динамическим позиционированием (ДП) является его способность позиционироваться в заданных условиях окружающей среды, какими являются ветер, волны и течение.
Скачать пример отчета о возможности удержания судна над точкой позиционированияОценка этого необходима:
Способность к позиционированию определяется как достижимый статический баланс между силами и моментами, создаваемыми окружающей средой и комплексом пропульсивных механизмов.
Баланс представляется в виде диаграммы в полярной системе координат, где:
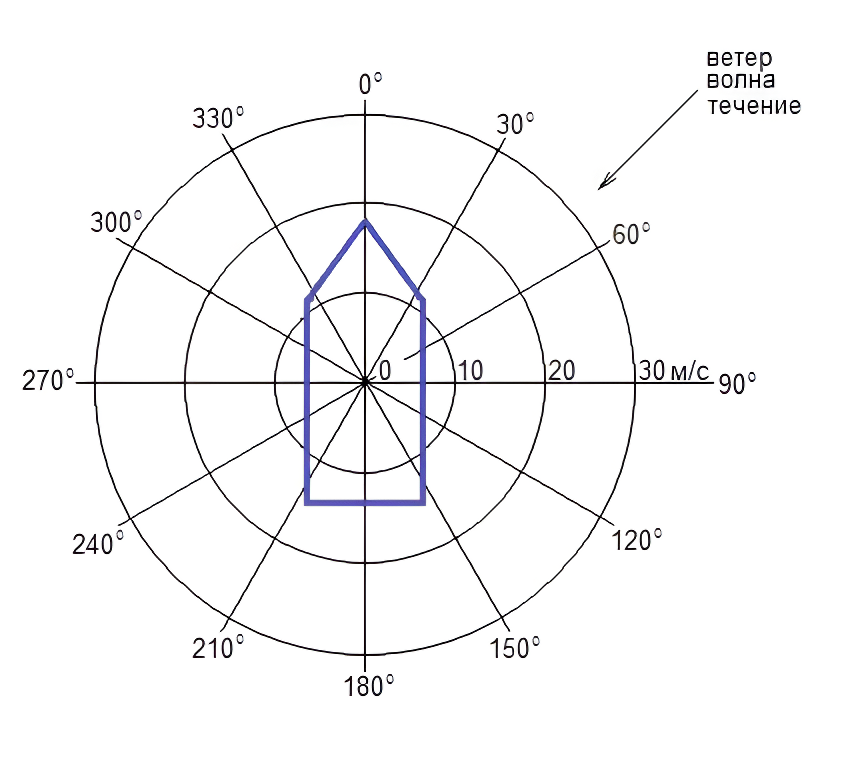
Такие диаграммы называются диаграммами удержания (capability plots) и строятся исходя из определенной зависимости высоты волн, от скорости ветра (ветро-волновой статистики), заданной скорости течения и сонаправленного действия факторов окружающей среды (ветра, волн и течения).
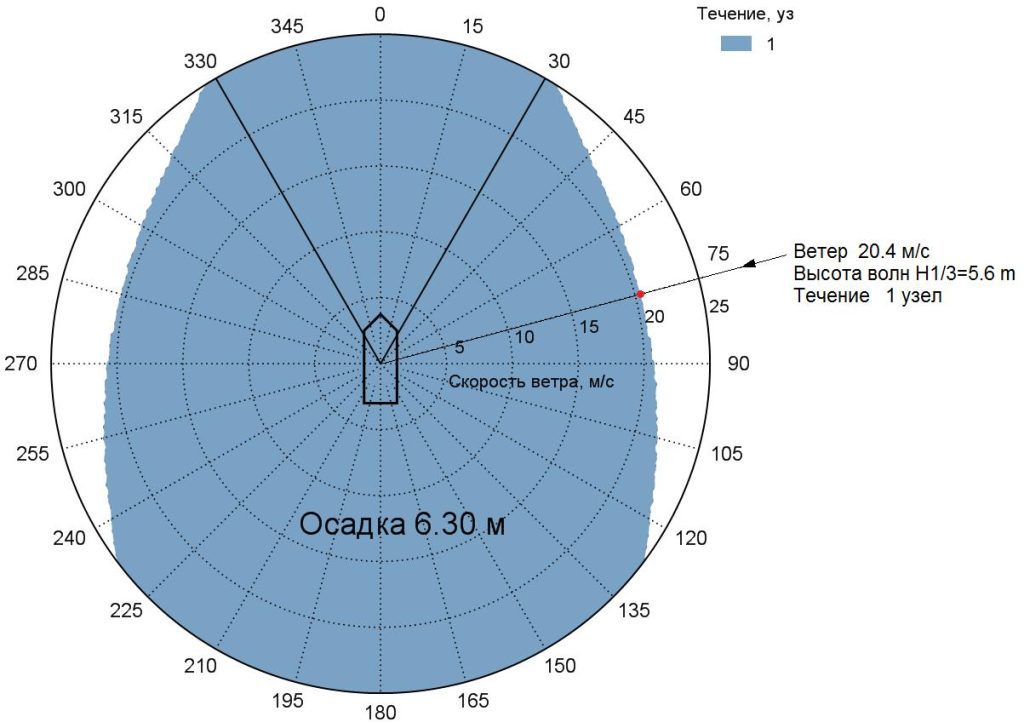
Диаграмма удержания ограничивает область внешних воздействий, для всех точек которой (ветер, волна, течение) судно способно удерживать позицию. Граница области (диаграмма удержания) соответствует максимальным значениям внешних воздействий в зависимости от их направления. В приведенном ниже примере (красная точка) судно будет способно удерживать позицию при воздействии на него максимального внешнего возмущения в виде течения скоростью 1 узел, ветра скоростью 20.4 м/с и волн значимой высоты 5.6 м, направленных с курсового угла 75°.
Для большинства судов с ДП диаграмма удержания будет вытянута вдоль диаметральной плоскости судна, так как комплекс пропульсивных механизмов создает наибольшую тягу именно в продольном направлении, а сопротивление судна внешним воздействиям минимальное, поэтому для задач позиционирования наиболее благоприятной является ситуация, когда внешнее возмущение воздействует на судно с носа или кормы.
Считается, что если сил, создаваемых пропульсивными механизмами судна, достаточно для противодействия силам окружающей среды, то судно способно удерживать позицию. Для построения диаграммы важно знать оценку гидро- и аэродинамических сил, действующих на корпус судна, возможности пропульсивных механизмов и уметь решать задачу распределения упоров.
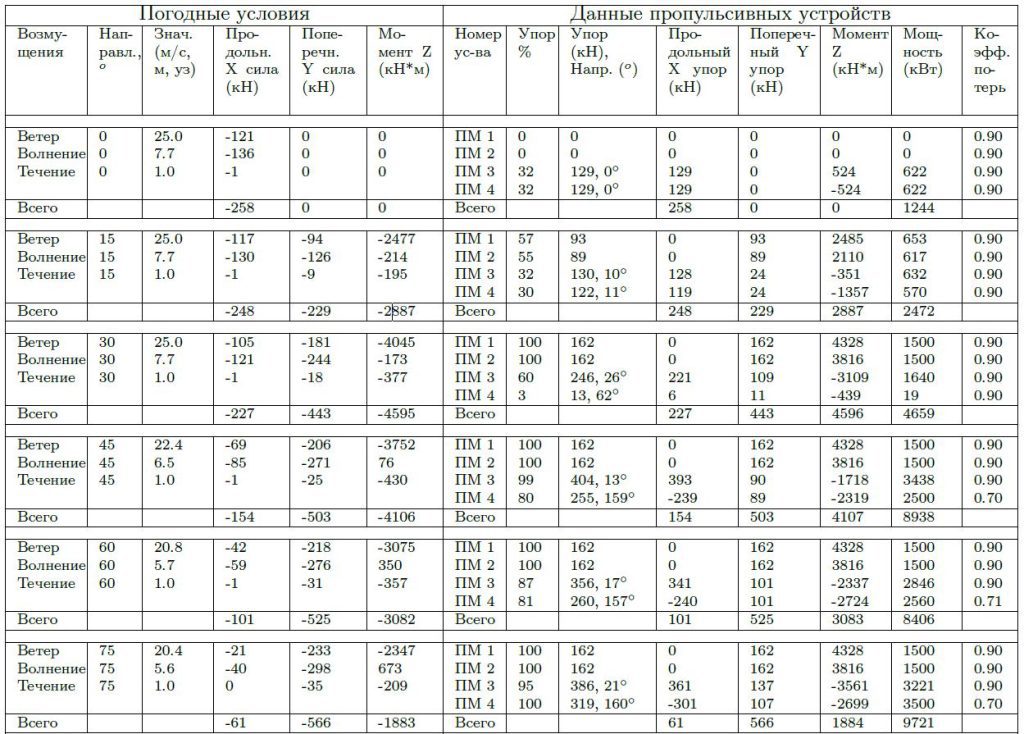
В отчете о способности судна к удержанию кроме полярной диаграммы прилагается также таблица, в которой для каждого курсового угла представлены значения сил внешнего возмущения и тяг пропульсивного механизма, необходимых для компенсации данного воздействия.
В диаграммах также могут учитываться дополнительные силы при выполнении специальных операций, такие как натяжение кабеля (кабелеукладчики), натяжение трубы (трубоукладчики), сила на грунтозаборном устройстве (земснаряды), сила реакции лафетного ствола (пожарные суда) и т.д.
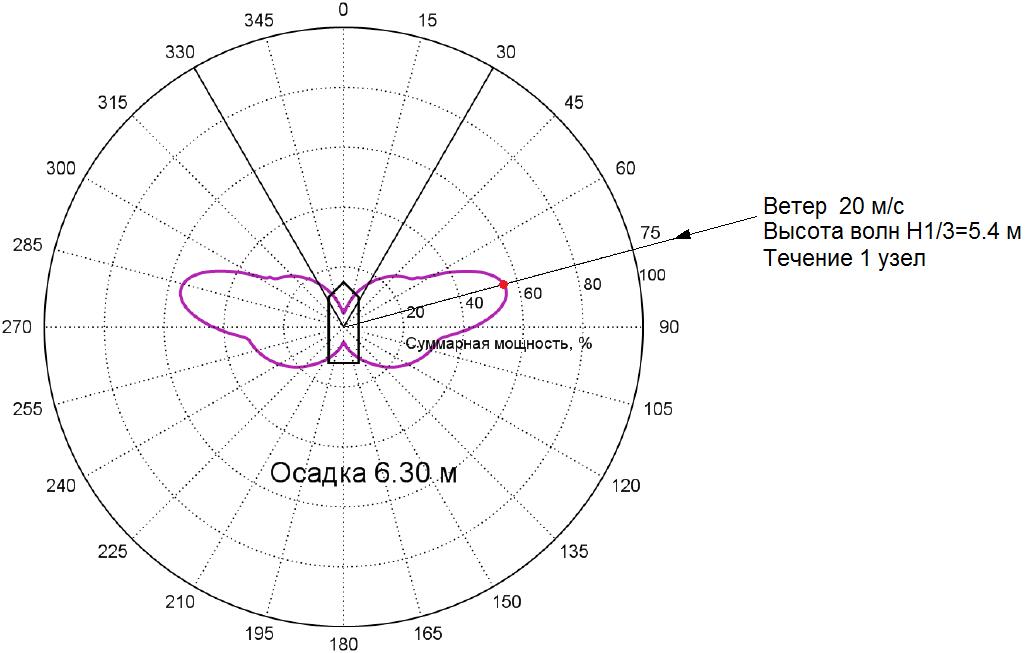
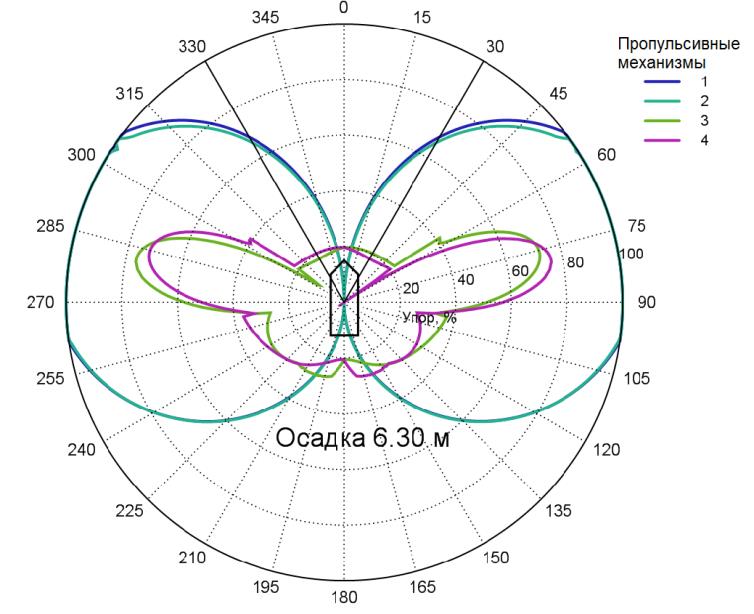
Возможно решение обратной задачи, когда для заданных условий окружающей среды в зависимости от направления воздействия, определяется мощность, потребляемая пропульсивными механизмами для удержания позиции. Результат представляется в виде полярных диаграмм мощности (power utilization). В приведенном ниже примере (красная точка) при воздействии на судно ветра скоростью 20 м/с, волн значимой высоты 5.4 м и течения скоростью 1 узел, направленных с курсового угла 75°, суммарная потребляемая пропульсивным комплексом мощность составит около 55% от максимальной.
Диаграммы мощности могут строиться также в абсолютных значениях (киловаттах) и для каждого пропульсивного механизма в отдельности.
Наряду с ними также могут создаваться диаграммы упоров (thrust utilization), которые показывают тягу, соответствующую потребляемой мощности в зависимости от направления воздействия внешнего возмущения. Как и диаграммы мощности, они показывают либо процент от максимальной тяги, либо тягу в абсолютных значениях (килоньютонах).
Для верификации диаграмм удержания рекомендуется в процессе эксплуатации судна проводить специальные тесты с целью набора статистики позиционирования в различных условиях окружающей среды (так называемые footprints). Одновременно footprints отражают реальную способность судна удерживать позицию и поэтому имеют приоритет в случае несовпадения с диаграммами удержания, полученными расчетным путем.
В 1997 году IMCA на базе документа 107 DPVOA “Specifications for DP capability plots” выпустил руководство IMCA M 140 “Specification for DP Capability Plots”(последняя редакция 2024 года), дополненное технической информацией поставщиков пропульсивных механизмов и практическим опытом ДП.
IMCA M 140 призван стандартизировать производство диаграмм удержания, делая возможным прямое сравнение различных судов и обеспечить общий формат представления способности к позиционированию.
Предлагается общая методика расчета сил от ветра, волн и течения, а также сил, создаваемых пропульсивными механизмами (туннельными ПУ, ВРК, водометными движителями, гребными винтами и рулями) для однокорпусных судов. Предполагается зависимость высоты и периода волн от скорости ветра по статистике Северного моря (North Sea), а скорость течения не зависящей от глубины.
Следует подчеркнуть, что IMCA M 140 является руководством по расчету диаграмм, предназначенных для оценки теоретической способности судна к ДП. Для более точной оценки обычно используются диаграммы удержания, пересчитанные на основании данных, полученных в результате ходовых испытаний, либо методика получения footprints изложенная в документе IMCA 182 MSF “International Guidelines for The Safe Operation of Dynamically Positioned Offshore Supply Vessels“.
В правилах классификационных обществ не устанавливаются требования к точности позиционирования и предельным погодным условиям, а также к мощности пропульсивных механизмов. Вместе с тем, некоторыми классификационными обществами введены численные показатели, производные от диаграмм удержания и характеризующие уровень способности судна держать позицию:
DNV – DP capability numbers (ранее Environmental Regularity Number – ERN);
LR – Performance Capability Rating (PCR);
BV – Environmental Station Keeping Index (ESKI);
ABS – Station Keeping Performance (SKP);
RINA – Station Keeping Capability (SKC).
Методики расчета показателей приведены в соответствующих документах классификационных обществ.
Наиболее всеобъемлющим является стандарт DNV-ST-0111 “Assessment of station keeping capability of dynamic positioning vessels”, вышедший в 2016 году с последующими редакциями 2018 и 2021 года.
Стандарт устанавливает три уровня требований к расчету диаграмм удержания: DP capability level 1, DP capability level 2 (level 2-site) и DP capability level 3 (level 3-site).
DP capability level 1 по назначению аналогичен IMCA M 140, но в сравнении с последним дополнительно учитывает снижение эффективности пропульсивных механизмов, например, из-за взаимодействия между собой и с корпусом судна.
DP capability level 2 (2-site) представляет развитие level 1, допуская:
DP capability level 3 (3-site) является принципиально новым подходом к построению диаграмм удержания. За основу берется моделирование динамики судна с ДП, включая воздействие окружающей среды (ветер, волны, течение), само судно (пропульсивные механизмы, энергетическая система) и систему управления ДП с датчиками. Точка диаграммы определяется за время моделирования статистически как наибольшая скорость ветра (с соответствующей волной), при которой отклонение судна от заданной позиции и курса находится в определенных пределах (соответственно 5 м и 3°). Пример результата моделирования приведен ниже.
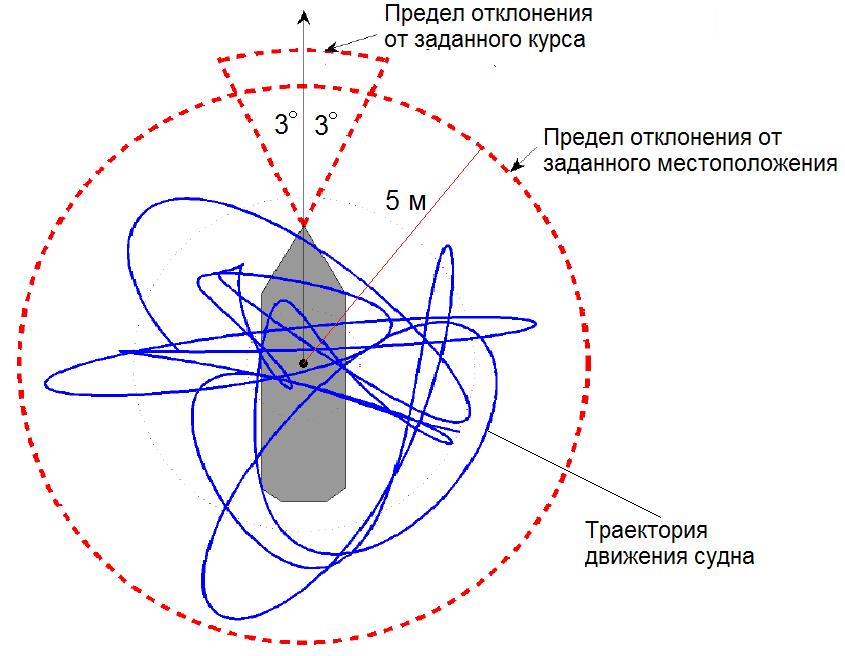
Такая технология построения диаграмм удержания, в том числе позволяет оценить точность позиционирования, что невозможно в классической постановке расчета диаграмм удержания, включая DP capability level 1 и 2. По своему принципу level 3 аналогичен процедуре footprint, но с реализацией путем моделирования.
Стандарт DNV-ST-0111 является основой сервиса DNV по расчету диаграмм удержания, реализованного на платформе Veracity в сети Internet.
Для расчета диаграмм удержания необходимы:
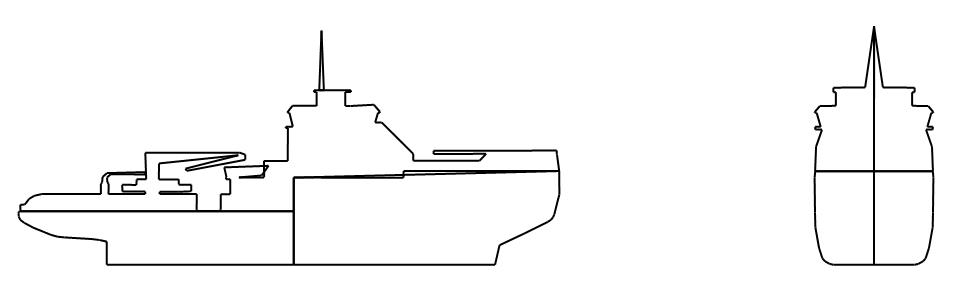
1) Общее расположение судна с основными размерениями.
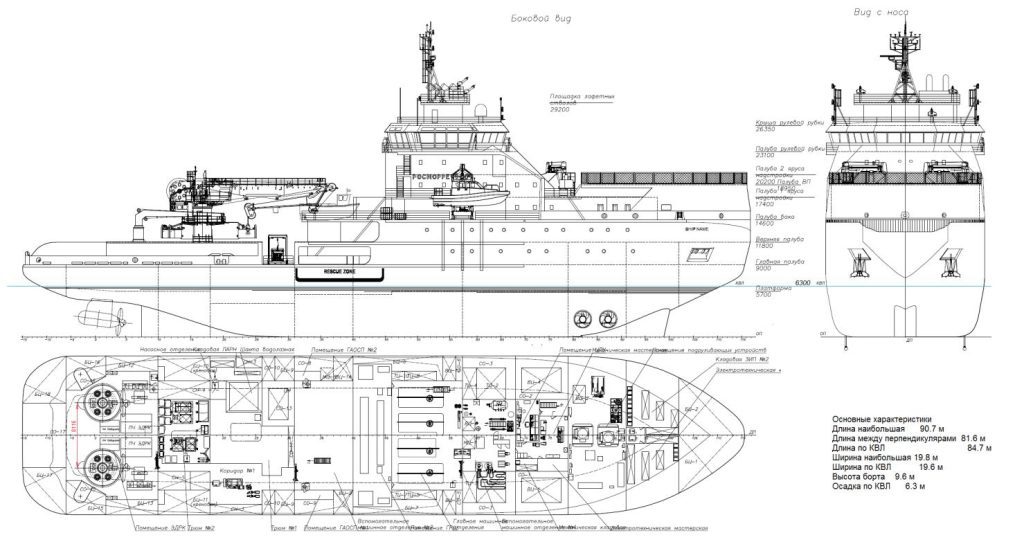
Из общего расположения определяются проекции бокового вида и вида с носа, необходимые для расчета сил от ветра, волн и течения.
2) Данные по энергетической установке (схема электроэнергетической системы и ее конфигурация в режиме ДП, мощность дополнительных потребителей, ограничения по нагрузке). По ним определяется доступная мощность для комплекса пропульсивных механизмов в режиме ДП, включая отказы в электроэнергетической системе (ЭЭС).
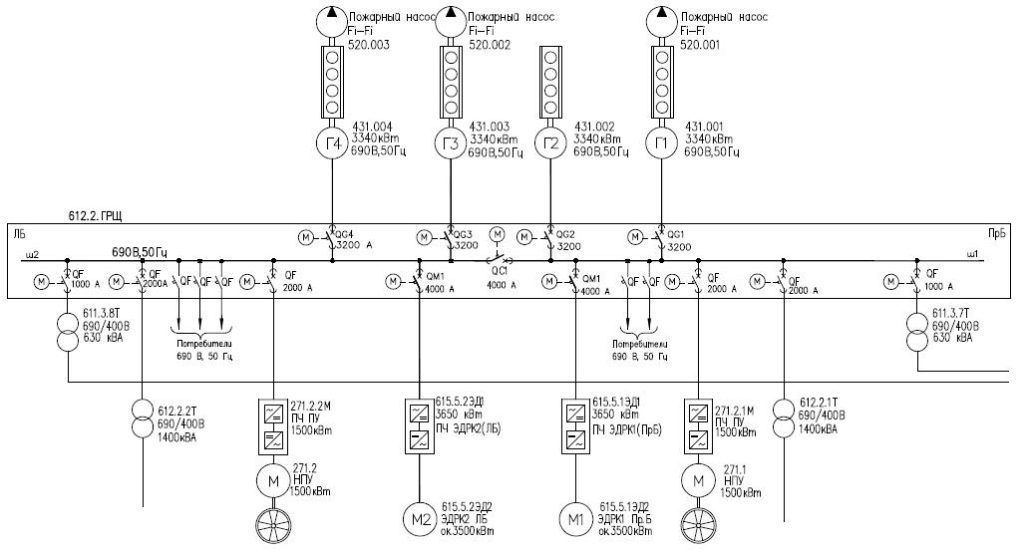
Пример схемы ЭЭС приведен ниже. ЭЭС включает главный распределительный щит (ГРЩ) из двух секций (шины левого и правого борта) и четыре генератора, по два на каждую шину. От каждой шины питается одно носовое подруливающее устройство (НПУ) и одна кормовая движительно-рулевая колонка (ДРК). Соединитель между шинами позволяет работать в конфигурации с единой шиной (размыкатель замкнут, четыре генератора работают на единую шину) и с двумя шинами (соединитель разомкнут, на каждую шину работают два генератора). Такая организация характерна для СДП класса 2, когда отказ одной из шин изолируется размыканием шинного соединителя и удержание позиции обеспечивается оставшимися НПУ и ДРК.
3) Данные по комплексу пропульсивных механизмов (тип и диаметры винтов, мощность приводных двигателей, тяга на швартовах…). Они необходимы для расчета сил, создаваемых пропульсивными механизмами в режиме ДП.
Для уточненного расчета может использоваться следующая информация:
Расчет диаграммы удержания представляется в виде электронного документа-отчета о способности судна к удержанию над точкой позиционирования.
Отчет состоит из общей информации о судне и его механизмах, методике расчета, набора полярных диаграмм и таблиц с результатами расчета.
Базовый расчет выполняется для следующих сценариев:
Расчет выполняется с учетом доступной мощности электроэнергетической системы и приводов пропульсивных механизмов.
Дополнительно могут рассчитываться любые сценарии отказов или ограничений.
Скачать пример отчета о возможности удержания судна над точкой позиционированияПринятый подход к расчету диаграмм удержания базируется на нормативных документах IMCA и классификационных обществ. За основу взят стандарт DNV-ST-0111, содержащий наиболее полную современную методику расчета.
Расчет диаграмм удержания:
Расчет диаграмм удержания реализован в виде прикладной программы.
При необходимости проведения динамического моделирования с целью определения качества позиционирования применяется компьютерное моделирование движения судна под действием факторов окружающей среды и сил, создаваемых пропульсивными механизмами, где также моделируются:
Компьютерная модель по своему назначению соответствует DNV level 3 (level 3-site).
На компьютерной модели основывается также технология настройки, тестирования и приемо-сдаточных испытаний СУ ДП. В этом случае она работает в реальном времени и поддерживает программно-аппаратные интерфейсы СУ ДП с пропульсивными механизмами, электроэнергетической системой, датчиками и СОМП.