
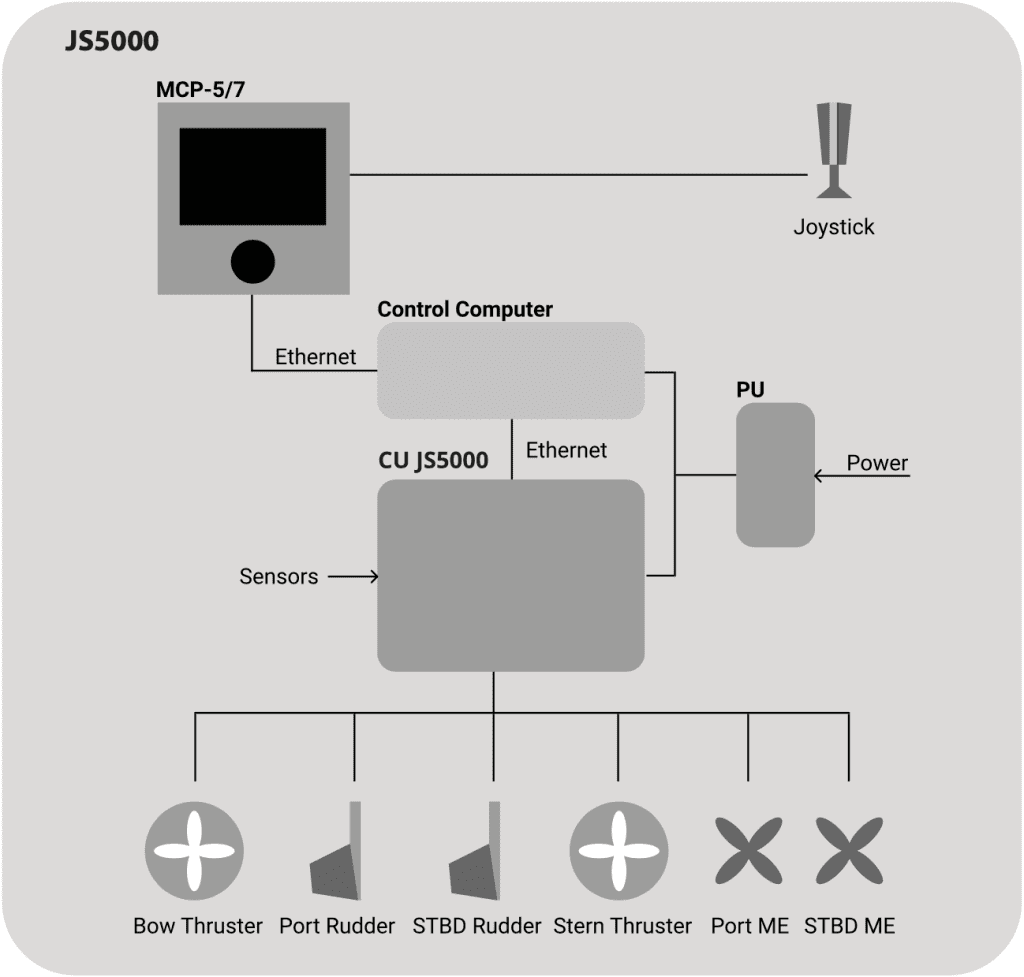
JS5000 – современное поколение системы управления джойстиком. Наряду с возможностью автоматического удержания позиции судна система обеспечивает ручное управление двигателями, ВРК и подруливающими устройствами с помощью одного джойстика.
Несмотря на схожую функциональность и алгоритмы работы, JS5000 не является полномасштабной системой управления динамическим позиционированием судна. Он предназначен для управления судоводителем, предлагая гораздо более простое управление по сравнению с СУДП.
Это решение оптимально для небольших рабочих судов (гидрографические и промерные
суда, суда для водолазных работ и т.п.) и яхт, которым требуются интеллектуальные автоматические функции с сочетанием точного ручного управления, но без сложного графического
интерфейса СУДП или сертификации СУДП.



Обзор системы js5000
- Алгоритмы, не требующие простоя судна для включения автоматических режимов.
- Современный дизайн и компактное исполнение
- Управление всеми движительными, рулевыми и подруливающими системами одним джойстиком
- Возможность работы с любыми типами движительных, рулевых и подруливающих устройств
- Отсутствие ограничений по водоизмещению и размерам судна
JS5000
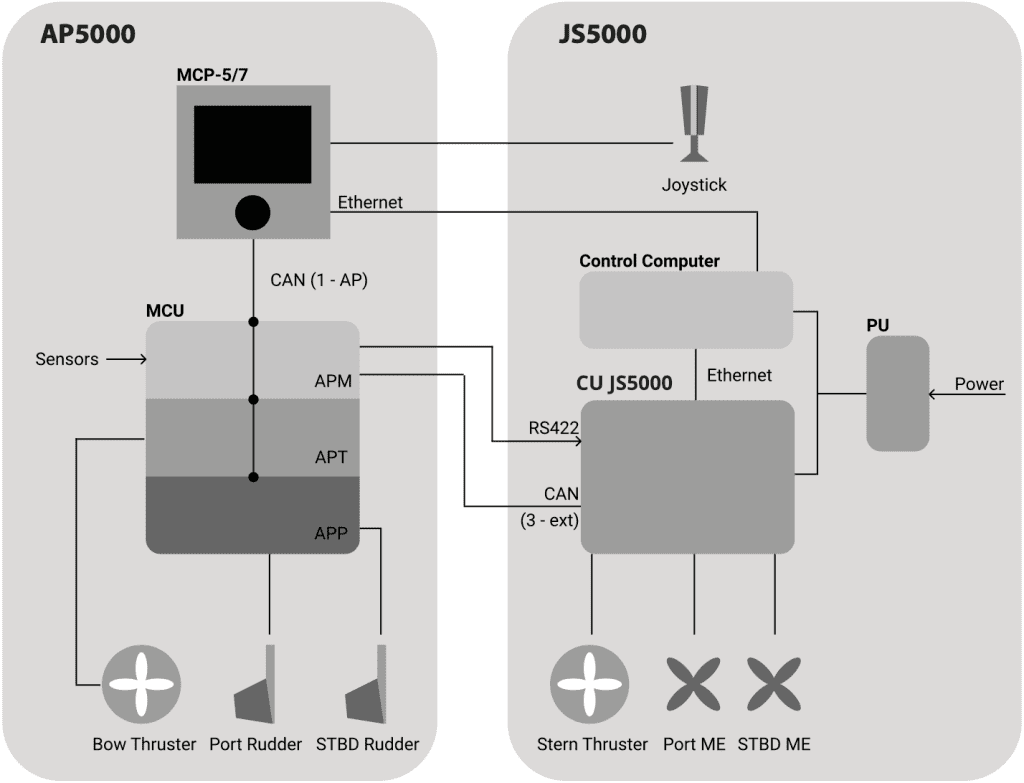
JS 5000 с сертифицированным авторулевым АР 5000
- Опционально интегрированный авторулевой AP5000, с одобрением РМРС и РРР
- Простая в понимании и работе система, даже для неподготовленного персонала
- Использование уникальных алгоритмов систем динамического позиционирования
- Автоматические режимы контроля курса, скорости и позиции
- Два типа панелей управления с джойстиком и дисплеем 5” или 7”
- Опциональная переносная панель управления с джойстиком и дисплеем 7”
Режимы управления
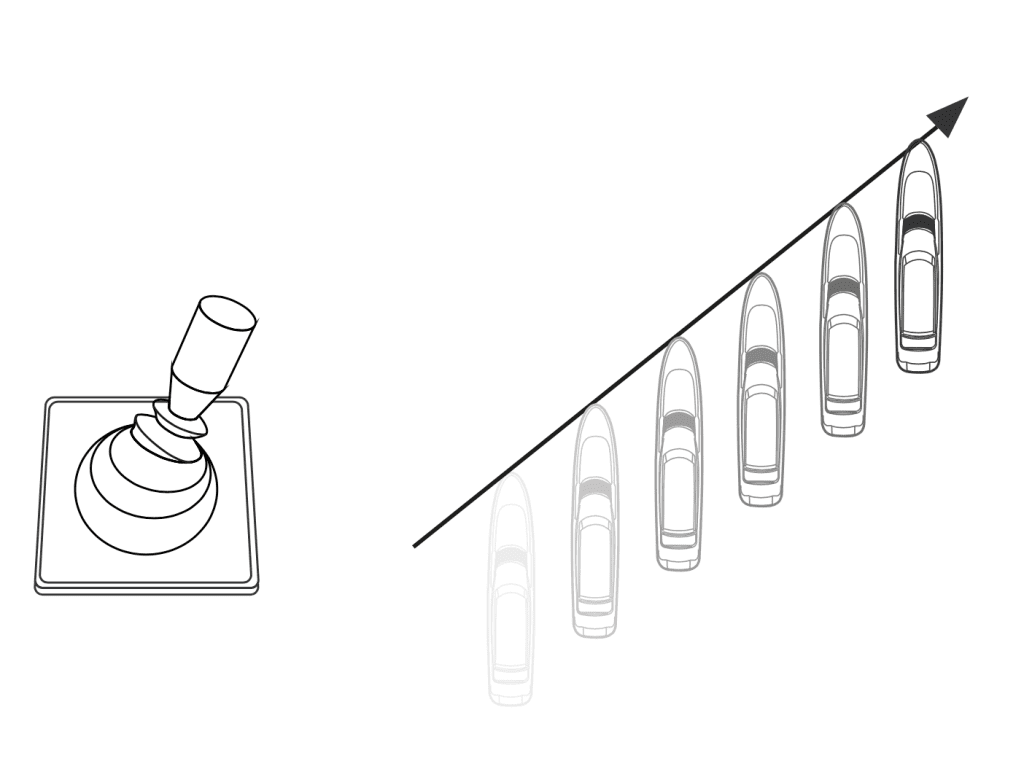
Joystick Manual
Ручное управление с помощью
3х-осевого джойстика.
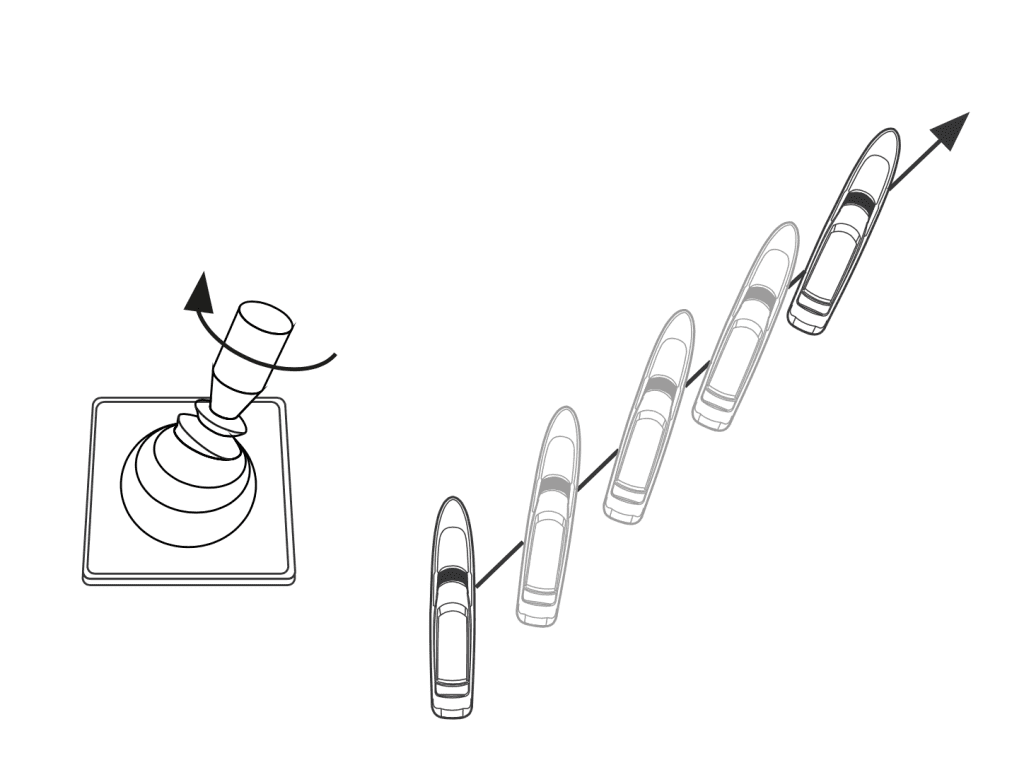
Joystick Heading
Управление с помощью джойстика при автоматическом удержании курса.
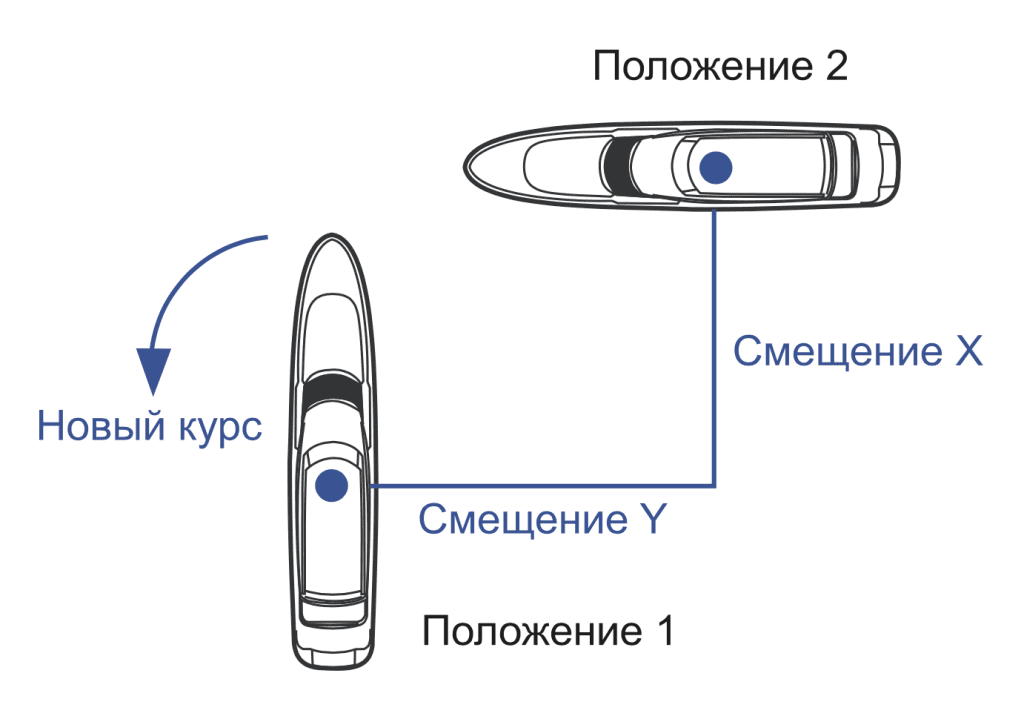
Joystick Position
Система автоматически удерживает курс и позицию судна в заданной точке.
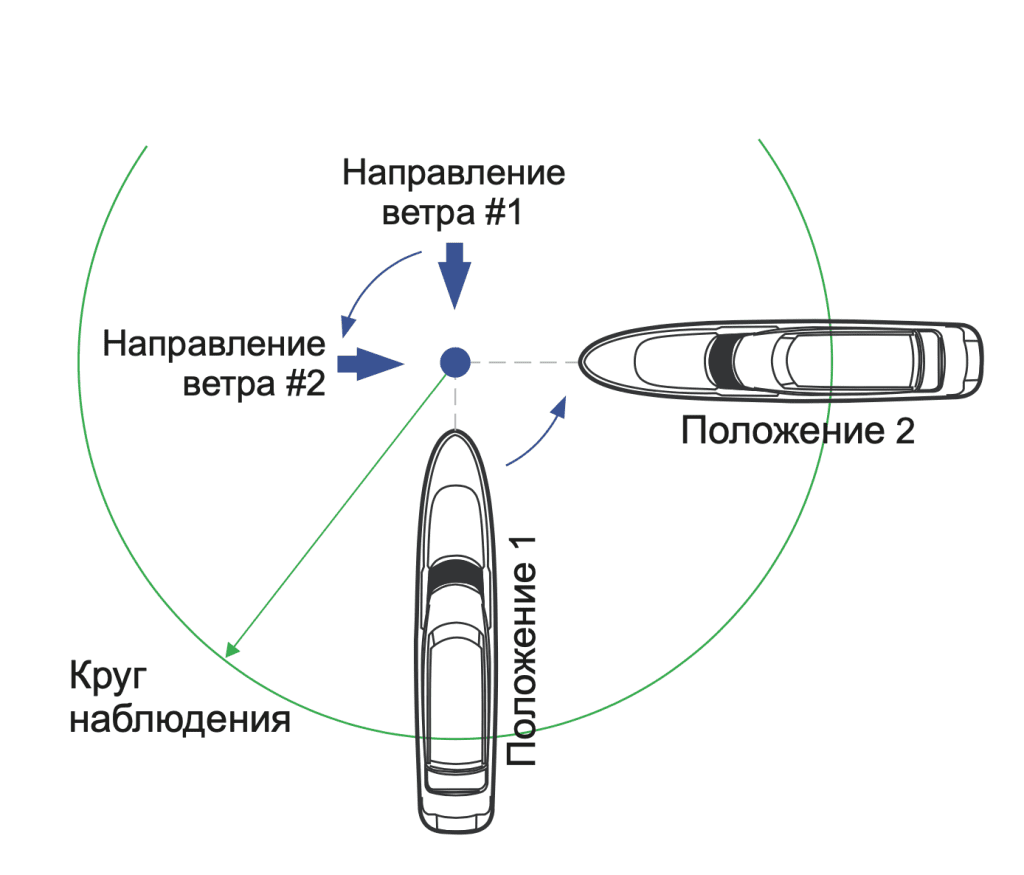
Joystick ECO Pos
Система удерживает заданное положение судна, используя минимальную нагрузку на движительные и подруливающие устройства, при этом курс автоматически подстраивается, чтобы держать нос судна против
ветра и/или течения.
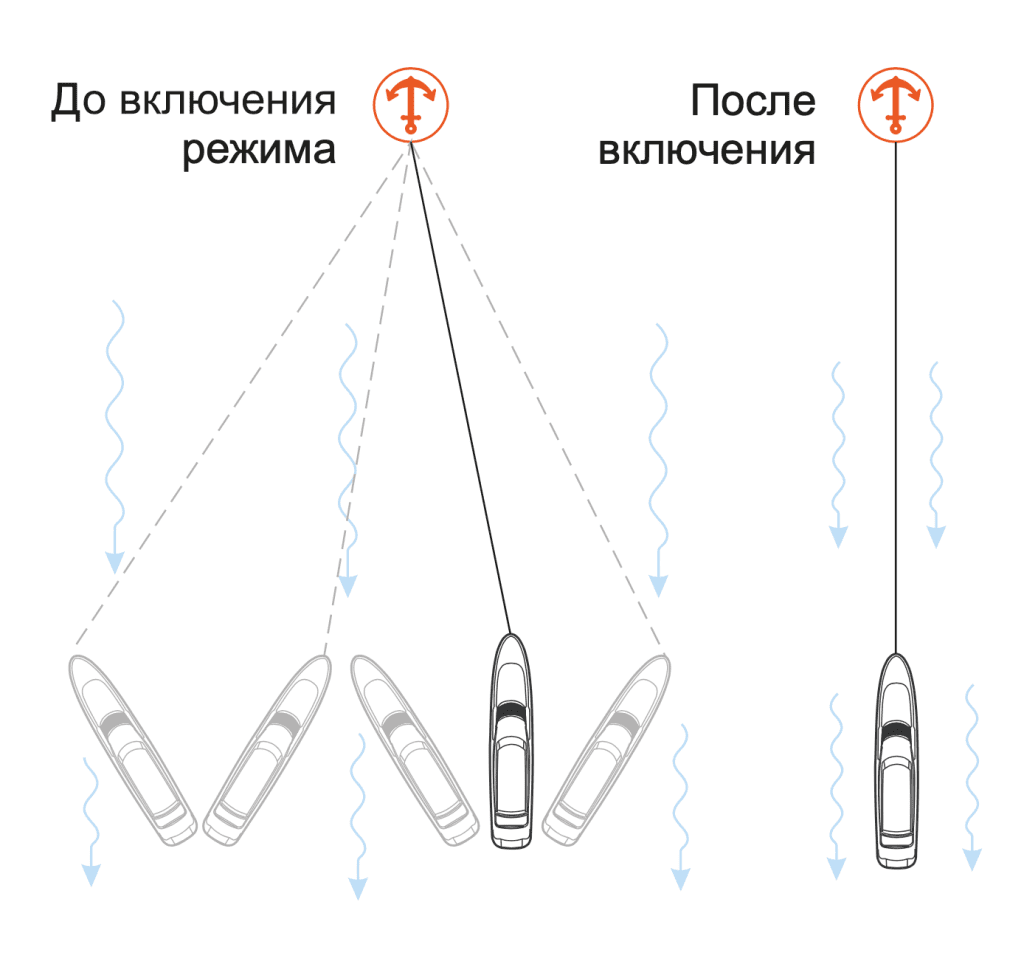
Joystick Anchor
Когда судно стоит на якоре, система автоматически подбирает и устанавливает оптимальный курс, направленный против ветра и/или течения, чтобы минимизировать рыскание. При этом используются только кормовые подруливающие устройства.
Судно удерживается на виртуальном якоре, сохраняя заданное расстояние от виртуальной якорной точки.
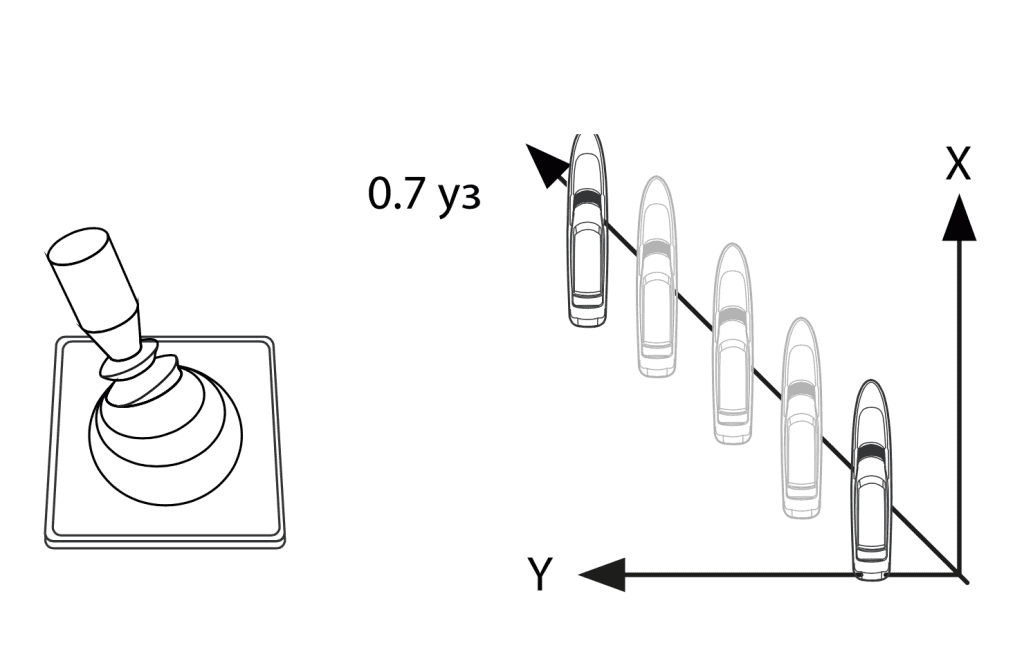
Joystick Speed
Джойстик используется для установки точных значений вектора COG и SOG при автоматическом удержании курса.
Элементы системы
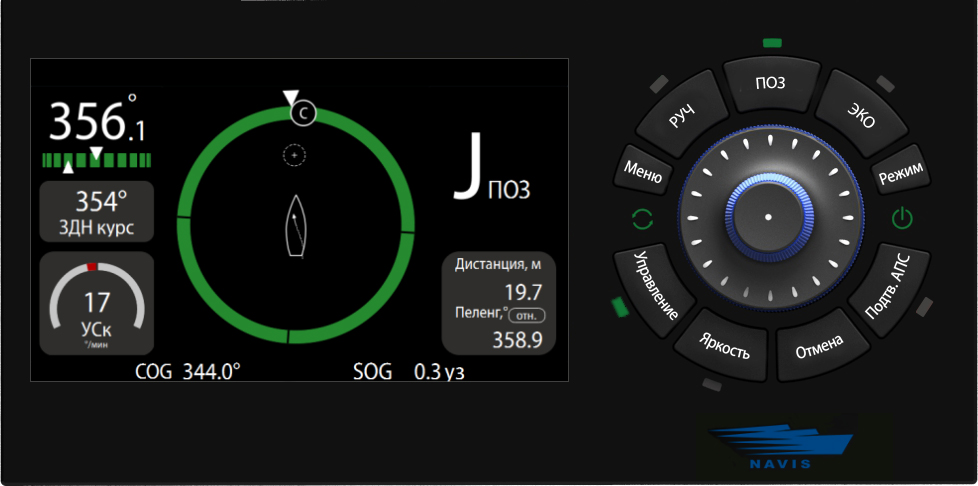
APH-5 / APH-7
Главная панель управления предназначена для:
- ввода сигналов управления от кнопок и поворотного задатчика;
- установки режимов работы и параметров джойстиковой системы JS5000;
- отображения информации джойстиковой системы JS5000 на встроенном цветном ЖК-дисплее;
- передачи управления между панелями;
- подтверждения АПС.
Технические характеристики панели APH-5:
Габаритные размеры (мм): 144 x 144 x 85 мм
Напряжение питания: 2 x 24 В пост. тока
Максимальная потребляемая мощность: 10 Вт
Степень защиты: IP56 (лицевая сторона) – IP22 (тыльная сторона)
Диапазон рабочих температур: — 20°С – +55°С
Диапазон температур хранения: — 40°С – +70°С
Безопасное расстояние до магнитного компаса: 600 мм

Технические характеристики панели APH-7:
Габаритные размеры (Ш×Г×В): 288 × 144 × 80 мм
Напряжение питания: 2 х 24 В пост. тока
Потребляемая мощность: 15 Вт (макс.)
Степень защиты: IP56 (лицевая сторона) – IP22 (тыльная сторона)
Рабочая температура: -20°C — +55 °C
Диапазон температур хранения: — 40°С – +70°С
Безопасное расстояние до магнитного компаса: 600 мм
Джойстик
Джойстик предназначен для:
- задания тяги (нагрузки на ПМ) в режимах ручного управления позицией судна и направления, величины скорости в режиме “Вектор скорости” путем наклона джойстика;
- задания момента вращения в режимах ручного управления курсом путем вращения поворотного задатчика рукоятки джойстика.

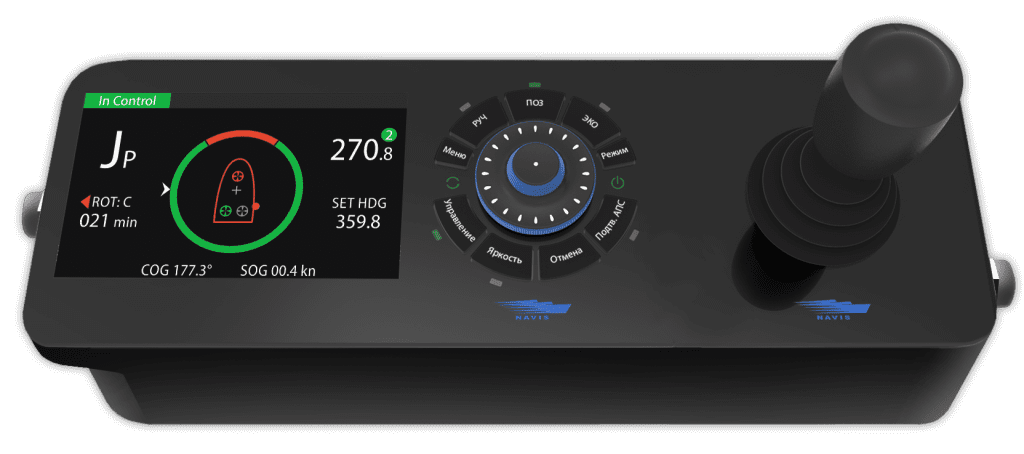
PCP-7
Выносная панель управления предназначена для:
- управления судном вручную при помощи джойстика и поворотного задатчика;
- установки режимов работы и параметров джойстиковой системы JS5000;
- отображения информации джойстиковой системы JS5000 на встроенном цветном ЖК-дисплее;
- передачи управления между панелями;
- подтверждения АПС.
Выносная панель управления обычно используется для управления движением судна с позиции, отличной от центра управления ДП, например, с кормы водолазного судна при работе специалистов.
КОНТАКТЫ
Акционерное общество «НАВИС»
ИНН 7802010831
Мы всегда рады видеть Вас по адресу:
195277, Россия, г. Санкт-Петербург, Пироговская набережная, 17к7, БЦ «ПЕРСЕЙ»
Остались вопросы?
Оставьте свои контакты, мы Вам перезвоним: